
Der Portalroboter besteht aus einem Säulenrahmen, einer X-Achsen-Komponente, einer Y-Achsen-Komponente, einer Z-Achsen-Komponente, einer Vorrichtung und einem Steuerkasten.
Es handelt sich um eine vollautomatische Industrieanlage, die auf dem rechteckigen dreidimensionalen X-, Y- und Z-Koordinatensystem basiert und die Werkstückposition anpassen oder die Flugbahnbewegung des Werkstücks realisieren kann. Sein Steuerungskern wird durch Industriesteuerungen implementiert.
Der Controller analysiert und verarbeitet verschiedene Eingangssignale, trifft logische Entscheidungen und gibt dann Ausführungsbefehle an jede Ausgangskomponente aus, um die Gelenkbewegung zwischen den X-, Y- und Z-Achsen abzuschließen und einen vollständigen Satz vollautomatischer Betriebsprozesse zu realisieren.
Es wird in der Produktmontage und im Transport, in Fördersystemen und an unbemannten Arbeitsplätzen eingesetzt. Es kann als wichtiges Peripheriegerät für die temporäre Lagerung und Logistik verwendet werden und kann zur einfachen Verwendung flexibel mit Host-Geräten kombiniert werden. Anwendungsbranchen, die sich mit der Endmontage, Untermontage, Verarbeitung, Prüfung, Fehlerbehebung und dem Transport von Produkten usw. befassen.
Produktmerkmale sollen Kunden dabei helfen, die Probleme geringer Effizienz oder hoher Handhabungsrisiken bei verschiedenen Arten der Materialhandhabung zu lösen, um Handhabungsrisiken bequem und schnell zu reduzieren, Zeit und Aufwand zu sparen, Arbeitskräfte einzusparen und sogar Arbeitskräfte zu ersetzen.
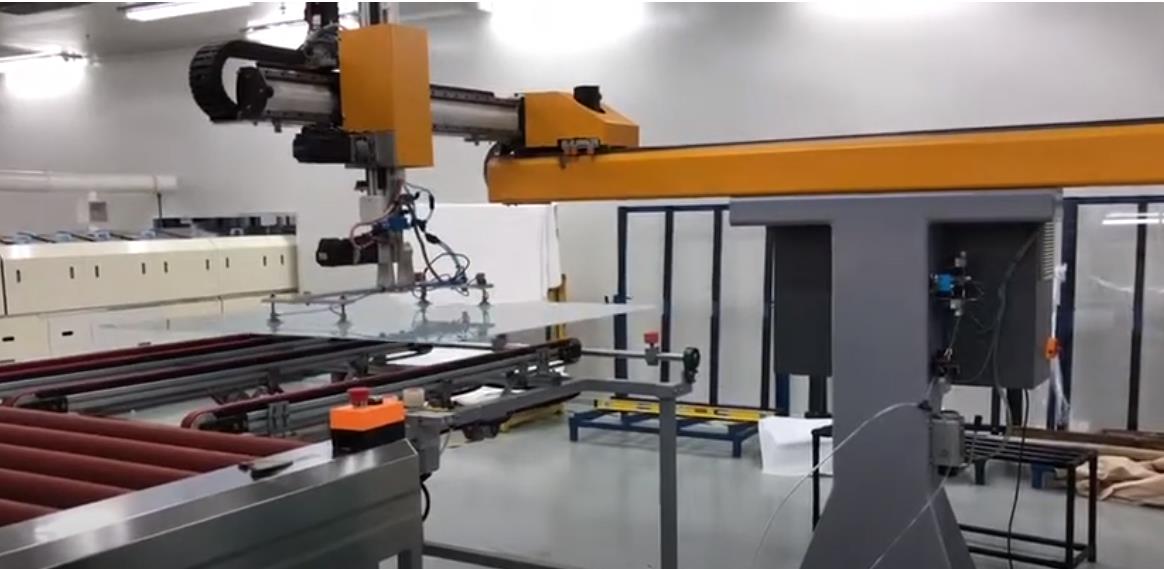
 Dieses Portalmanipulator-Handhabungsgerät für Glas umfasst Säulen und an den Säulen installierte Querträger. Die Querträger werden mit Gleitschienen montiert. Die Gleitschienen werden mit einer Querschiebevorrichtung montiert. Die Querschiebevorrichtung ist mit einer Vertikalschiebevorrichtung und einer pneumatischen Saugnapfvorrichtung ausgestattet. Es kann realisiert werden, dass sich der Transportmechanismus an einem festen Punkt im dreidimensionalen Raum bewegt, das Glas durch den Saugnapf ansaugt. Zuerst seitlich auf der X-Achse bewegen, dann um 90 Grad in die vorgesehene Position drehen und dann nach oben bewegen und nach unten auf der Y-Achse. Nachdem Sie die eingestellte Position erreicht haben, lassen Sie das Glas los und stellen Sie es auf die Glasablage. Die strukturelle Stabilität des gesamten Gerätes ist sehr hoch, was die Handhabung deutlich verbessert. Effizienz.
Dieses Portalmanipulator-Handhabungsgerät für Glas umfasst Säulen und an den Säulen installierte Querträger. Die Querträger werden mit Gleitschienen montiert. Die Gleitschienen werden mit einer Querschiebevorrichtung montiert. Die Querschiebevorrichtung ist mit einer Vertikalschiebevorrichtung und einer pneumatischen Saugnapfvorrichtung ausgestattet. Es kann realisiert werden, dass sich der Transportmechanismus an einem festen Punkt im dreidimensionalen Raum bewegt, das Glas durch den Saugnapf ansaugt. Zuerst seitlich auf der X-Achse bewegen, dann um 90 Grad in die vorgesehene Position drehen und dann nach oben bewegen und nach unten auf der Y-Achse. Nachdem Sie die eingestellte Position erreicht haben, lassen Sie das Glas los und stellen Sie es auf die Glasablage. Die strukturelle Stabilität des gesamten Gerätes ist sehr hoch, was die Handhabung deutlich verbessert. Effizienz.

Zeitpunkt der Veröffentlichung: 18. März 2024



