
Produkte



Pneumatischer Manipulator zur Glashandhabung mit Saugnapf
Kurzbeschreibung:
Der pneumatische Manipulator, auch bekannt als Manipulator, Balance-Kran, Balance-Booster oder manuelle Lastübertragungsmaschine (die obige Aussage ist nicht professionell, aber in China beliebt), ist ein neuartiger Manipulator, der für die Materialhandhabung und -installation sowie den arbeitssparenden Betrieb von Kraftgeräten verwendet wird.

Der pneumatische Manipulator zur Glashandhabung mit Saugnapf wendet das Gleichgewichtsprinzip der Kraft an, so dass der Bediener den schweren Gegenstand entsprechend schieben und ziehen kann, wodurch die bewegliche Positionierung im Raum ausgeglichen werden kann. Der schwere Gegenstand bildet beim Heben oder Senken einen schwebenden Zustand und nicht- Die Betätigungskraft wird durch die Gasstraße garantiert (der Verarbeitungsprozess und die Konstruktionskostenkontrolle, die Betätigungskraft beträgt weniger als 3 kg als Beurteilungsstandard), die Betätigungskraft wird durch das Werkstückgewicht des Werkstücks beeinflusst. Ohne qualifizierte Bedienung wird die Der Bediener kann den schweren Gegenstand von Hand schieben und ziehen und das Gewicht in jeder Position im Raum richtig platzieren.

über uns

Wir sind ein professioneller Hersteller kundenspezifischer Automatisierungsgeräte. Zu unseren Produkten gehören Depalettierer, Pick-and-Place-Verpackungsmaschinen, Palettierer, Roboterintegrationsanwendungen, Lade- und Entlademanipulatoren, Kartonformung, Kartonversiegelung, Palettenspender, Verpackungsmaschinen und andere Automatisierungslösungen für die Back-End-Verpackungsproduktionslinie.
Unsere Fabrikfläche beträgt ca. 3.500 Quadratmeter. Das technische Kernteam verfügt im Durchschnitt über 5–10 Jahre Erfahrung in der mechanischen Automatisierung, darunter 2 Maschinenbauingenieure. 1 Programmieringenieur, 8 Montagearbeiter, 4 Kundendienstmitarbeiter und 10 weitere Mitarbeiter
Unser Grundsatz lautet „Kunde zuerst, Qualität zuerst, Ruf zuerst“. Wir helfen unseren Kunden stets, „die Produktionskapazität zu erhöhen, Kosten zu senken und die Qualität zu verbessern“. Wir streben danach, ein Top-Lieferant in der Maschinenautomatisierungsbranche zu werden.
- 1. Struktur: Der vollständig pneumatische Kraftmanipulator besteht hauptsächlich aus dem Installationsspeicherhost und der Vorrichtung.2. Das Installationsfundament ist unterteilt in: 1. Feste Säule 2. Mobiler Sockel 3. Feste Deckenaufhängung 4Deckenaufhängung ist mobil
3. Vorrichtung: Im Allgemeinen angepasst an die vom Kunden bereitgestellte Erscheinungsgröße des Teils.1. Hakentyp; 2. Greiftyp; 3. Anzugsart; 4. interner Anstiegstyp; 5. Aufzugstyp; 6. Grifftyp; 7. Griffdrehtransformation (Flip 90° oder 180°) 0; 8. Vakuumadsorption; 9. Vakuumadsorptions-Drehungstransformation (Flip 90° oder 180°) und andere, speziell ausgewählt und entwickelt und entworfen, haben einen guten Nutzungseffekt erzielt.
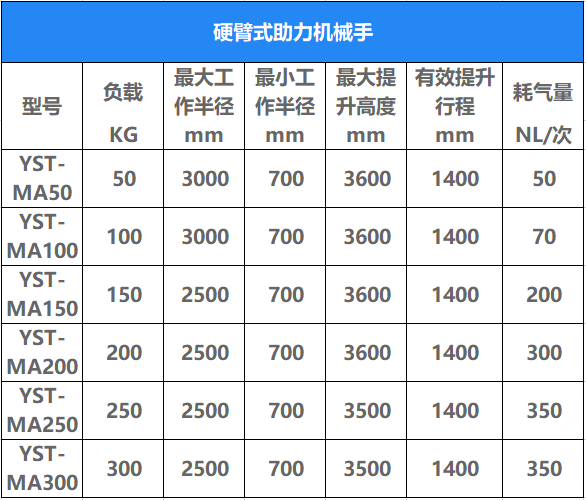
4. Host: besteht hauptsächlich aus einem ausgeglichenen Zylinder und einem starren Ausleger mit mehreren Abschaltungen. Die Hauptparameter sind Hubkapazität und Serviceradius.
Produktbeschreibung
Glashandhabung mit Saugnapf Pneumatische Manipulatoren wurden für den Betrieb mit überhängenden Lasten entwickelt. Aus diesem Grund sind sie zum Be- und Entladen von Industriemaschinen unbedingt erforderlich. Dank pneumatischem Zubehör und Sonderzubehör ist es nicht nur möglich, Teile anzuheben, sondern auch zu drehen, zu kippen und auf den Kopf zu stellen oder einfacher zu neigen.
Produktmerkmale
1. Der vollständig pneumatische Kraftmanipulator besteht hauptsächlich aus dem Installationsspeicherhost und der Vorrichtung.
2. Das Installationsfundament ist unterteilt in: 1. Feste Säule 2. Mobiler Sockel 3. Feste Deckenaufhängung 4Deckenaufhängung ist mobil
3. Vorrichtung: Im Allgemeinen angepasst an die vom Kunden bereitgestellte Erscheinungsgröße des Teils.1. Hakentyp; 2. Greiftyp; 3. Anzugsart; 4. interner Anstiegstyp; 5. Aufzugstyp; 6. Grifftyp; 7. Griffdrehtransformation (Flip 90° oder 180°) 0; 8. Vakuumadsorption; 9. Vakuumadsorptions-Drehungstransformation (Flip 90° oder 180°) und andere, speziell ausgewählt und entwickelt und entworfen, haben einen guten Nutzungseffekt erzielt.
4. Host: besteht hauptsächlich aus einem ausgeglichenen Zylinder und einem starren Ausleger mit mehreren Abschaltungen. Die Hauptparameter sind Hubkapazität und Serviceradius.







