
Produkte

Automatischer Kartonpalettierer in Portalbauweise
Kurzbeschreibung:
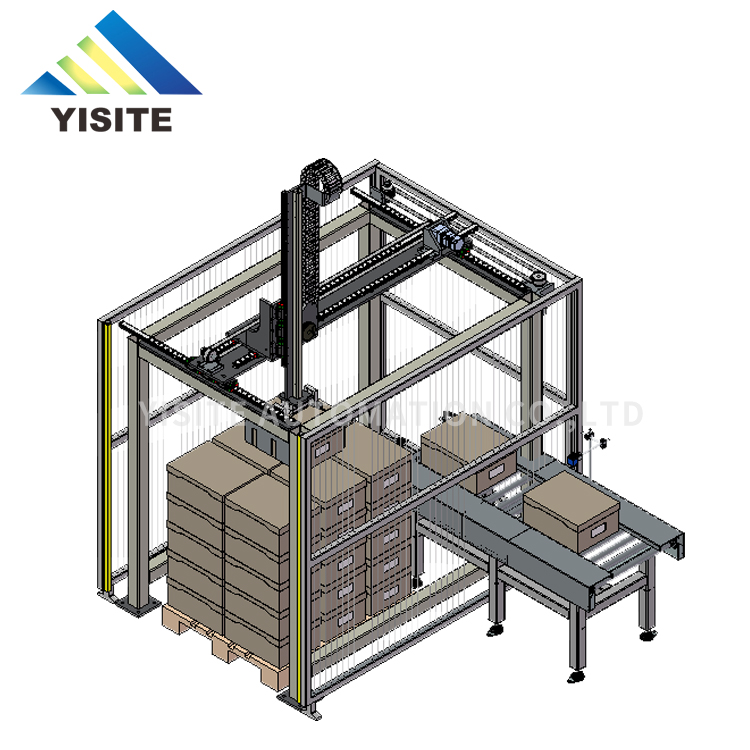
Produkteinführung für Kartonagenportal-Autopalettierer: Die Haupteinheit des Palettierers besteht aus einem Wagen, der vorwärts und rückwärts fahren kann, einem Rahmen und einer Trägerplattform, die nach oben und unten angehoben werden kann. Größe und Befestigung können individuell angepasst werden.
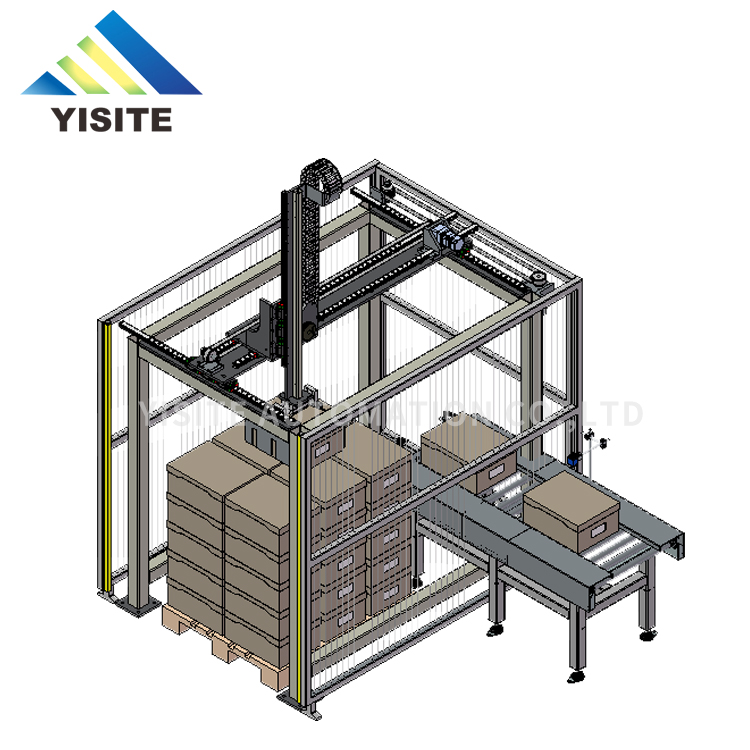
Der automatische Portalpalettierer für Kartons verfügt über ein spezielles Design mit pneumatischem Griff, einstellbarem Druck und einem Druckpufferventil, sodass die mit einem Induktionsmechanismus ausgestattete Greifaktion das Objekt automatisch erkennen und die Steuerzentrale über den Objektgriff informieren kann.

über uns

Wir sind ein professioneller Hersteller kundenspezifischer Automatisierungsgeräte. Zu unseren Produkten gehören Depalettierer, Pick-and-Place-Verpackungsmaschinen, Palettierer, Roboterintegrationsanwendungen, Lade- und Entlademanipulatoren, Kartonformung, Kartonversiegelung, Palettenspender, Verpackungsmaschinen und andere Automatisierungslösungen für die Back-End-Verpackungsproduktionslinie.
Unsere Fabrikfläche beträgt ca. 3.500 Quadratmeter. Das technische Kernteam verfügt im Durchschnitt über 5–10 Jahre Erfahrung in der mechanischen Automatisierung, darunter 2 Maschinenbauingenieure. 1 Programmieringenieur, 8 Montagearbeiter, 4 Kundendienstmitarbeiter und 10 weitere Mitarbeiter
Unser Grundsatz lautet „Kunde zuerst, Qualität zuerst, Ruf zuerst“. Wir helfen unseren Kunden stets, „die Produktionskapazität zu erhöhen, Kosten zu senken und die Qualität zu verbessern“. Wir streben danach, ein Top-Lieferant in der Maschinenautomatisierungsbranche zu werden.
Truss XYZ vollautomatischer Karton-Stapelmanipulator
1. Aufbau der Staplermaschine
Die Palettiermaschine besteht aus einem Installationsrahmen, einem Positionierungssystem, einem Servoantriebssystem, einem Steuersystem, einem elektrischen Steuer- und Verteilungssystem, einer Sicherheitsschutzvorrichtung usw. und ist mit einem automatischen Zufuhrpositionierungssystem ausgestattet. (Optionales automatisches Stapelversorgungssystem)
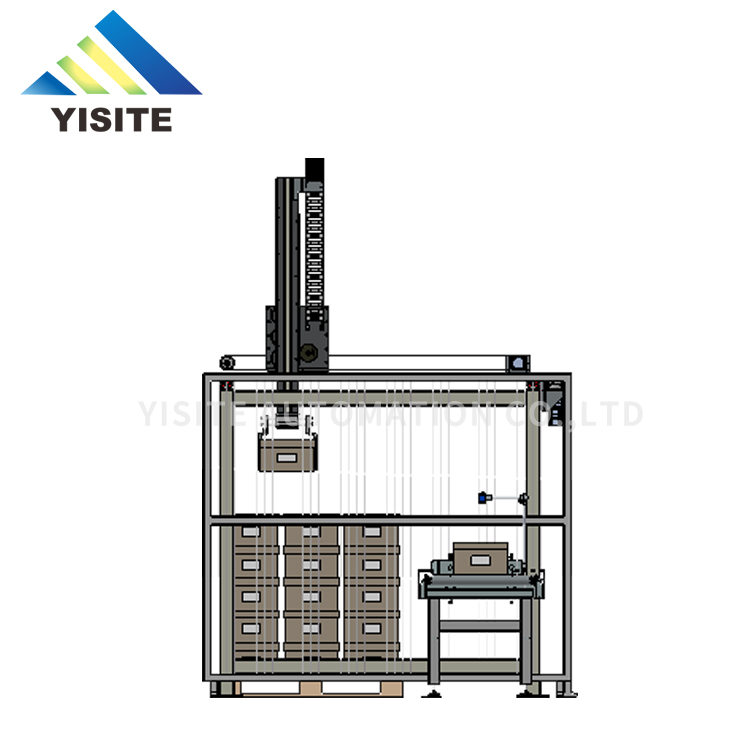
2. Montagegestell der Stapelmaschine
Da die Bewegungsgeschwindigkeit des Staplers sehr hoch ist, hat der Ausgangszustand einen großen Einfluss auf den Montagerahmen. Der Montagerahmen muss sehr steif sein, um den stabilen Betrieb des Stapels zu gewährleisten, daher haben wir die geschweißte Stahlrahmenkonstruktion so konstruiert dem Stützrahmen.
3. Positionierungssystem für Stapler- und Palettiermaschinen
Das Staplerpositionierungssystem ist der Kern der gesamten Ausrüstung, ein Produkt der Yaskawa Company (Japan), schnelle Bewegungsgeschwindigkeit und hohe Wiederholgenauigkeit. Drei Koordinaten X, Y, Z werden für die synchrone Zahnriemenübertragung ausgewählt, einzelne Koordinate Die Wiederholpositionierungsgenauigkeit beträgt 0,1 mm, die Geschwindigkeit der schnellen Linienbewegung: 1000 mm/s. Die X-Achse ist ein einzelnes Positionierungssystem mit einer einzelnen Länge von 3000 mm und einer Spannweite von 1935 mm. Der Synchronsender sorgt für die synchrone Bewegung der beiden Positionierungssysteme und wird von einem 1500-W-Servomotor angetrieben. Zur Anpassung des Antriebsdrehmoments und der Trägheit gibt es ein hochpräzises Planetengetriebe.
Die Y-Achse verwendet ein duales Positionierungssystem. Der Grund dafür, dass die Positionierungseinheit einen so großen Querschnitt hat, liegt hauptsächlich darin, dass die Y-Achse eine Doppelendstütze mit mittlerer Aufhängungsstruktur ist. Wenn der ausgewählte Querschnitt nicht ausreicht, ist die Stabilität der Roboterbewegung nicht gewährleistet und der Roboter zittert, wenn er sich mit hoher Geschwindigkeit bewegt. Zwei Positioniereinheiten werden nebeneinander verwendet, um die Z-Achse in der Mitte zu fixieren und auszubalancieren die Ladung gut. Dieser Installationsmodus weist eine sehr gute Stabilität auf. Die beiden Positionierungssysteme werden von einem 1500-W-Servomotor angetrieben, der mit einem hochpräzisen Planetengetriebe zur Abstimmung von Antriebsdrehmoment und Trägheit ausgestattet ist.
Das Z-Achsen-Positionierungssystem ist fest und stabil. Bei dem Produkt ist im Allgemeinen der Schieber fixiert und die gesamte Auf- und Abbewegung erfolgt. Der Servomotor muss das Objekt schnell verbessern, was große Schwerkraft- und Beschleunigungskräfte überwinden muss und mehr Leistung benötigt .In der Praxis haben wir uns für einen 2000-W-Servomotor entschieden, der mit einem hochpräzisen Planetengetriebe ausgestattet ist. Die A-Achse ist die Rotationsachse.
4. Servoantriebssystem
Die Stapelmanipulatormaschine verwendet einen Servomotor mit digitaler Funktion. Jede Motorwelle ist mit einem Servomotor und einem Untersetzungsgetriebe ausgestattet, vier Servomotoren und vier Untersetzungsgetriebe, einschließlich eines Vertikalmotors mit Verriegelungsservomotor.
5. Staplergriff
Das Stapeln mit einem speziellen Design des pneumatischen Griffs, einstellbarem Druck und einem Druckpufferventil, so dass die mit einem Induktionsmechanismus ausgestattete Greifaktion das Objekt automatisch erkennen und das Kontrollzentrum über den Objektgriff informieren kann.
6, Kontrollsystem
Das Steuerungssystem besteht aus einer großen SPS und einem Touchscreen. Das System verfügt über leistungsstarke Programmierfunktionen. Bei verschiedenen Palettiermodellen kann das System eine Vielzahl von Artefaktprogrammen voreinstellen und als Ersatz kann das entsprechende Programm auf dem Touchscreen bedient werden.
7, Sicherheitsvorrichtung
Die Maschine verfügt über eine Fehleraufforderungs- und Alarmfunktion, und jeder Fehler kann den spezifischen Ort genau widerspiegeln, wodurch Fehler einfach und schnell behoben werden können, hauptsächlich einschließlich: Roboterkollisionsschutzfunktion; Erkennung der Werkstückinstallation an Ort und Stelle; Lichtgitter-Sicherheitsschutz.
Technische Parameter
1. Maschinenmodell: YST-MD1500
2. Stapelkapazität: 200-500 Kartons / H
3. Rahmen: SS41 (A3-Stahlspritzguss-Kunststoffbehandlung), Welle S45C-Lagerstahl
4. Leistung: Wechselstrom, 3 Phasen, 380 V, 9 kW, 50 Hz
5. Luftverbrauch: 500 NL/MIN (Luftverbrauch: 5-6 kg/cm2)
6. Geräteabmessungen: (L) 3500 mm (B) 2250 mm (H) 2800 mm (abhängig vom tatsächlichen Layout-Design)
7. Gerätegewicht: 1.500 kg


Hauptvorteil Konfiguration
1. Servomotor der Marke Yaskawa
2. Geschwindigkeitsreduzierer der Marke Taiwan
3. Mitsubishi (Japan) PLC
4. Bei Schneider sind Schütze und Schalter zu verwenden
5. Omron fotoelektrischer Sensor
6. Schnittstellensteuerung, Anzeigeaktion, Alarmstatus und Alarmfunktion
7. Frequenzumrichter der Marke Yaskawa
8. Der Rahmen und die Seitenwände bestehen aus Kohlenstoffstahl
9. Taiwan AirTac Pneumatikelemente
10. Italienische PIAB-Marke Sucker









