
Produkte





YST-124Autobatterieunterstützter Manipulator
Kurzbeschreibung:
Der kraftunterstützte Manipulator mit hartem Arm besteht aus einem Ausgleichsträger, einer Greifvorrichtung und einer Installationsstruktur. Er kann verschiedene Gewichte von 20 bis 300 kg ausgleichen und eignet sich für Materialtransfervorgänge.

Die Eigenschaften des vollständigen Gleichgewichts und der reibungslosen Bewegung ermöglichen dem Bediener eine einfache Handhabung, Positionierung, Montage und andere Vorgänge des Werkstücks. Es verfügt über eine hohe Stabilität, einfache Bedienung, hohe Effizienz, hohe Sicherheitsleistung und ist mit einer Gasabschaltschutzvorrichtung ausgestattet. Die Hauptkomponenten stammen alle von international bekannten Marken und die Qualität ist garantiert.
Es verfügt über eine Vollfederungsfunktion und ist einfach zu bedienen; nach ergonomischen Grundsätzen hergestellt, ist es komfortabel und bequem zu bedienen; der konstruktive Aufbau ist modular und die Luftkreislaufregelung integriert; Die Arbeitskosten werden um 50 % gesenkt, die Arbeitsintensität wird um 85 % reduziert und die Produktionseffizienz wird um 50 % gesteigert; Je nach Belastung und Hub werden sie individuell angepasst und sind in verschiedenen Formen erhältlich, um unterschiedlichen Anforderungen gerecht zu werden.
Anwendungsbereich von kraftunterstützten Manipulatoren: weit verbreitet beim Be- und Entladen von Lagern in der Automobilindustrie, der chemischen Industrie, der Produktverpackung, der Elektrogeräteindustrie, der Industrie für keramische Sanitärartikel, der Baustoff- und Möbelindustrie, der Metallteile sowie der Maschinenherstellung und -verarbeitung. Wiederholte Hochfrequenz-Handhabungsarbeiten, Erdgas- und Erdölenergieindustrie, neue Energiebatterien, automatisierte Logistik und andere Industrien, ausgestattet mit verschiedenen Greifern, können die Handhabung und Palettierung von Produkten unterschiedlicher Form in verschiedenen Branchen realisieren.

über uns

Wir sind ein professioneller Hersteller kundenspezifischer Automatisierungsgeräte. Zu unseren Produkten gehören Depalettierer, Pick-and-Place-Verpackungsmaschinen, Palettierer, Roboterintegrationsanwendungen, Lade- und Entlademanipulatoren, Kartonformung, Kartonversiegelung, Palettenspender, Verpackungsmaschinen und andere Automatisierungslösungen für die Back-End-Verpackungsproduktionslinie.
Unsere Fabrikfläche beträgt ca. 3.500 Quadratmeter. Das technische Kernteam verfügt im Durchschnitt über 5–10 Jahre Erfahrung in der mechanischen Automatisierung, darunter 2 Maschinenbauingenieure. 1 Programmieringenieur, 8 Montagearbeiter, 4 Kundendienstmitarbeiter und 10 weitere Mitarbeiter
Unser Grundsatz lautet „Kunde zuerst, Qualität zuerst, Ruf zuerst“. Wir helfen unseren Kunden stets, „die Produktionskapazität zu erhöhen, Kosten zu senken und die Qualität zu verbessern“. Wir streben danach, ein Top-Lieferant in der Maschinenautomatisierungsbranche zu werden.
Robotermanipulator mit Kabelantrieb
| Modell | YST-124 | |
| Mechanische Struktur | Assistierter Manipulator | |
| Art der Ausführung | Halbautomatisierung | |
| Palettierungsgewicht (ohne Vorrichtung) | 250 KG | |
| Bewegungsachse | 3 Achsen | |
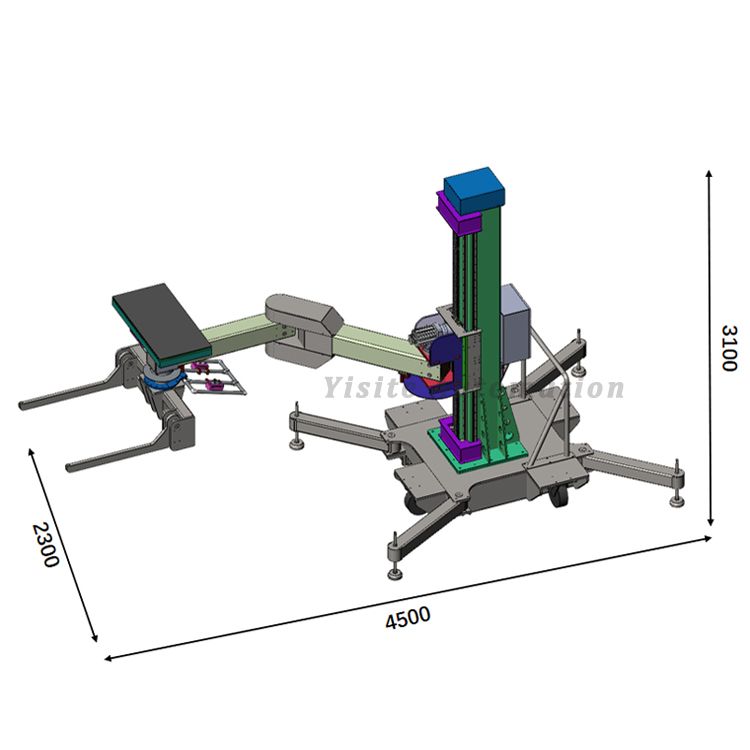
| Betätigungsbereich | Z-Achse (oben unten) | 1500 mm |
| Achse 1 (Spin) | 0~300° | |
| Achse 2 (Spin) | 0~300° | |
| Achse 3 (Spin) | 0~300° | |
| Maximaler Spinradius | 2500 mm | |
| Das Körpergewicht (ohne Vorrichtung) | 3000 KG | |
Produktdetails
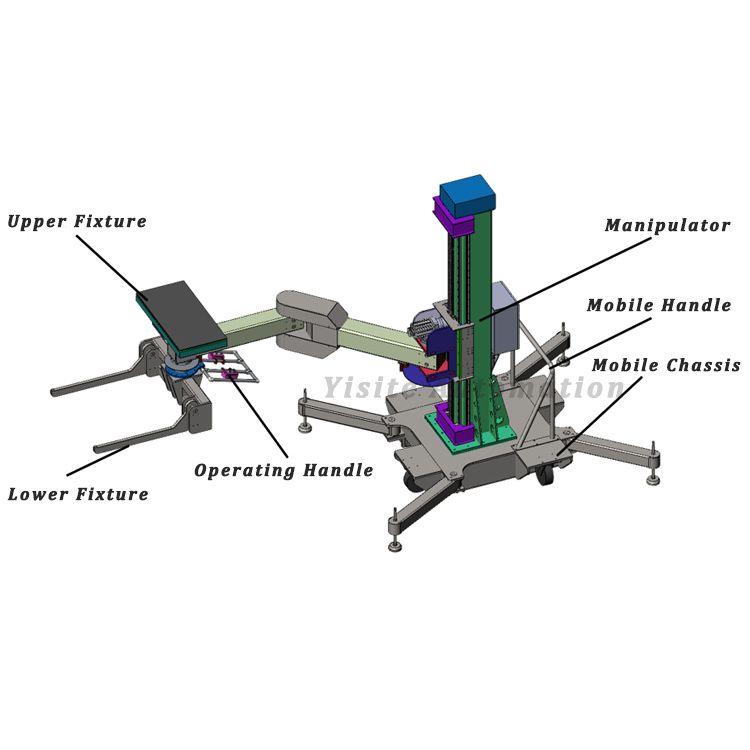
Bei dem Projekt handelt es sich um eine Hilfsmontage und Handhabung einer Autobatterie.
Betätigen Sie den Manipulator manuell, um die Batterie in das Auto einzubauen, oder heben Sie das Fahrgestell an, um es zu laden.
Das Produktgewicht beträgt 250 kg.
Der Manipulator ist beweglich und 3-gelenkig drehbar.
Arbeitsradius 2,5 Meter, Hubhöhe 1,5 Meter.









